三次元物体解析
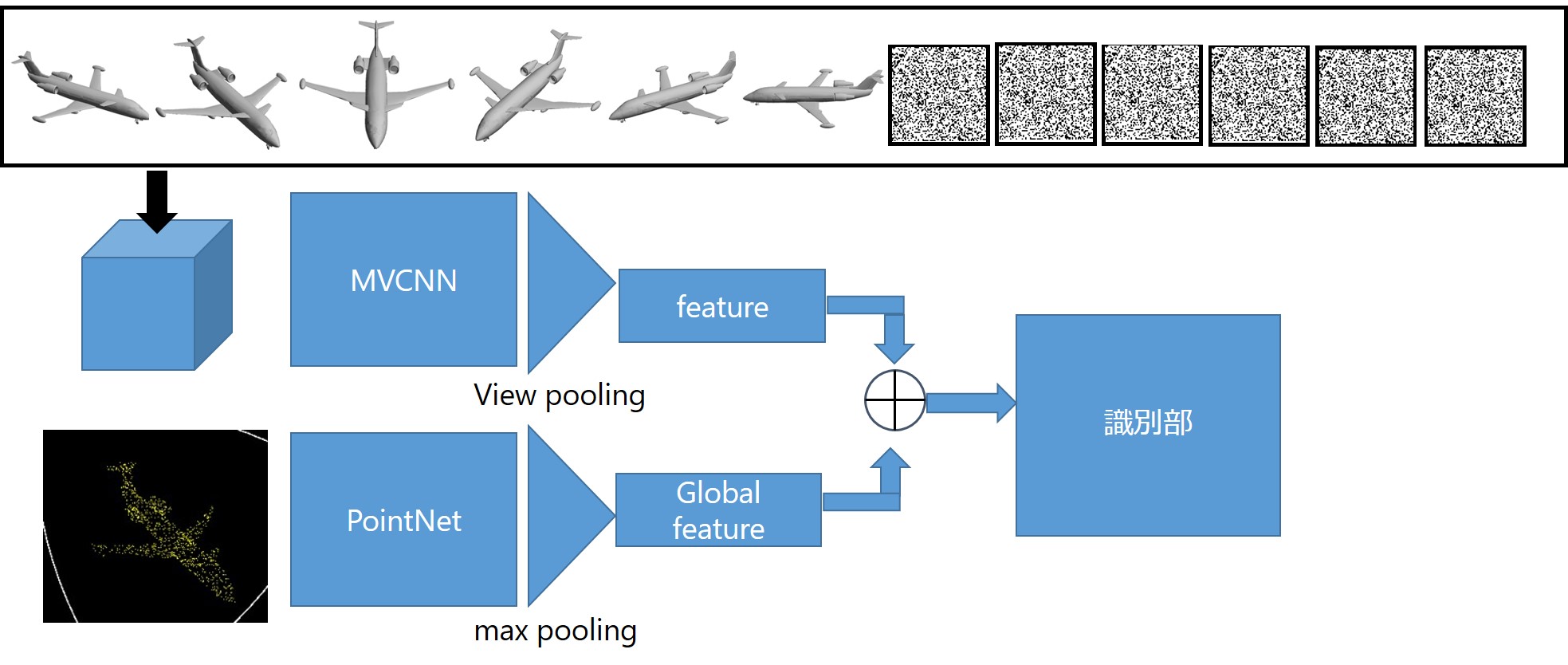
三次元物体認識
入力データ不足(欠損)を考慮した物体認識をします.
パーツ分割
フラクタル次元を用いて高精度なパーツ分割をします.

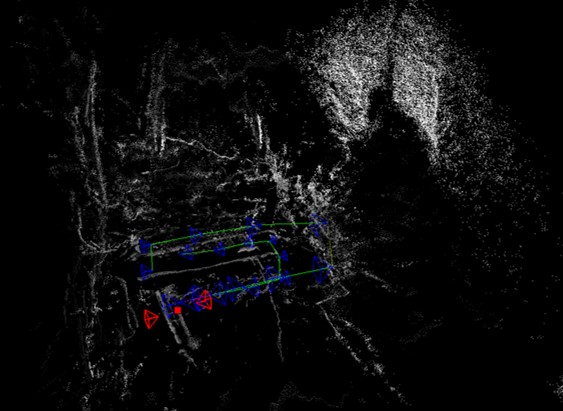
SLAM(Simultaneous Localization And Mapping)
全天球カメラを用いた環境復元をします.
COPYRIGHT OSAKA METROPOLITAN UNIVERSITY. INTELLIGENT SIGNAL PROCESSING LABO, 2018 All rights reserved.